Gaussian processes¶
Gaussian processes model a probability distribution over functions.
Let  be some function mapping vectors to vectors. Then we can write:
be some function mapping vectors to vectors. Then we can write:

where  represents the mean vector:
represents the mean vector:
![m(x) = \mathbb{E}[f(x)]](_images/math/d69127adddd1b83f730339cf12d32516769e16f1.svg)
and  is the kernel function.
is the kernel function.
Kernel function¶
The kernel is a function that represents the covariance function for the Gaussian process.

![k(x,x') = \mathbb{E}[(f(x) - m(x))(f(x') - m(x'))^T]](_images/math/06726ae1dbe4ea445ace540bb2e254b95837688f.svg)
The kernel can be thought of as a prior for the shape of the function, encoding our expectations for the amount of smoothness or non-linearity.
Not all conceivable kernels are valid. The kernel must produce covariance matrices that are positive-definite.


 and
and  :
:
Gaussian kernel¶
Also known as the radial basis function or RBF kernel.

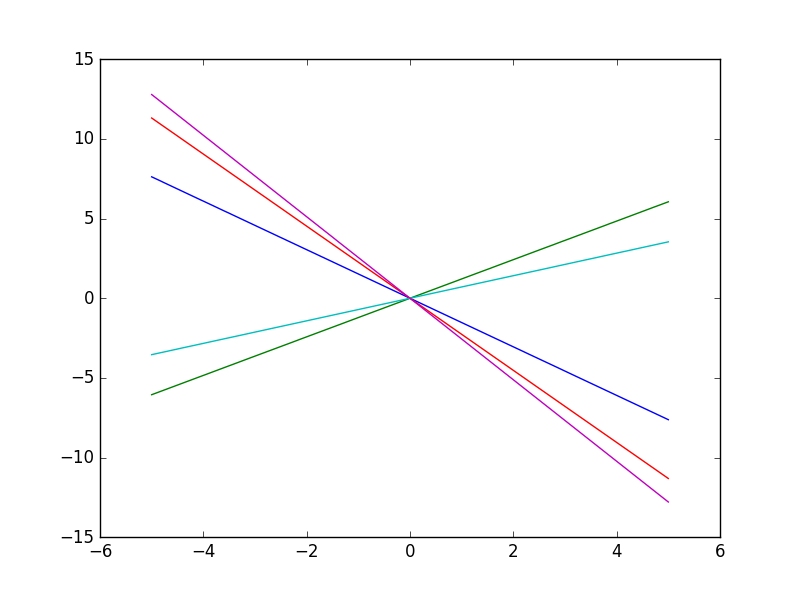
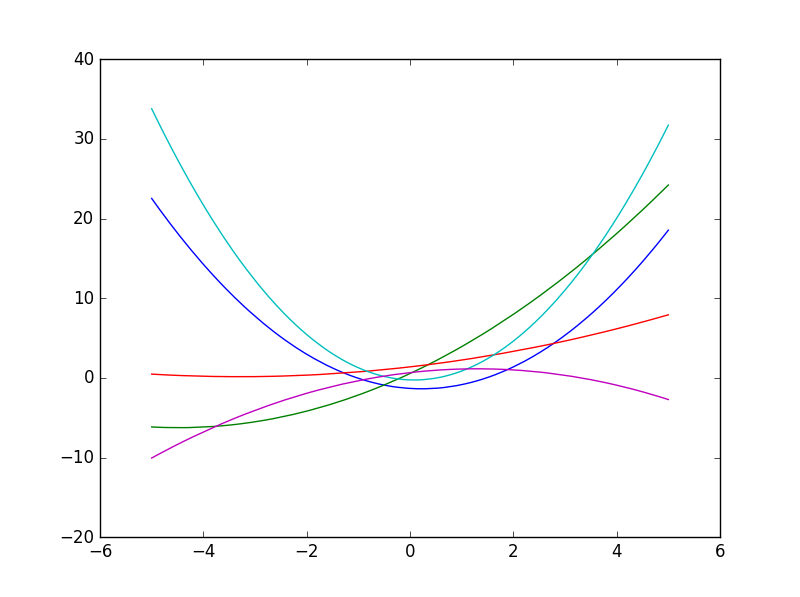
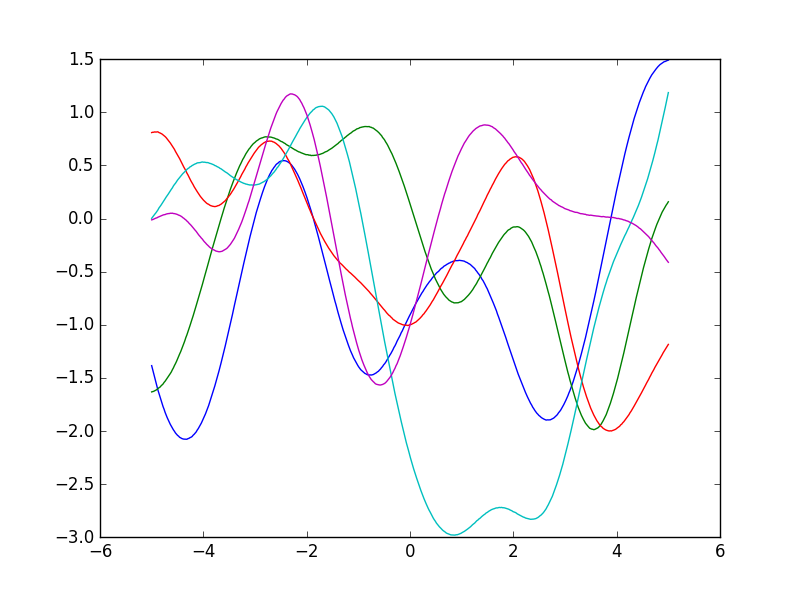
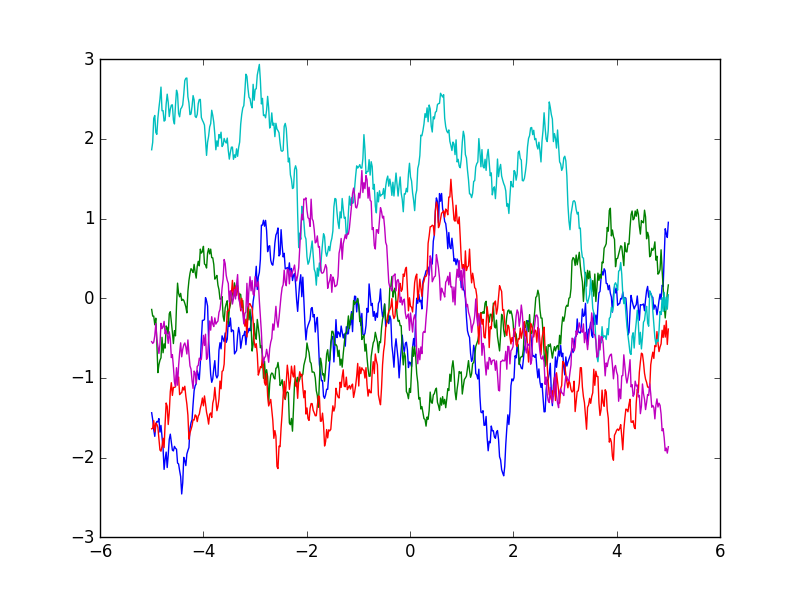
Some functions sampled from a GP with a Gaussian kernel:

Sampling from a Gaussian process¶
The method is as follows:
- Decide on a vector of inputs
 for which we want to compute , where
for which we want to compute , where  is some function which we will sample from the Gaussian process.
is some function which we will sample from the Gaussian process. - Compute the matrix
 where
where  .
. - Perform Cholesky decomposition on , yielding a lower triangular matrix
 .
. - Sample a vector of numbers from a standard Gaussian distribution,
 .
. - Take the dot product of and the vector
 to get the samples
to get the samples  .
.